Sistemas de Coordenadas (2D)
CoordinateSystem2D
Um sistema de coordenadas 2D definido por dois eixos Direction2D e uma origem Point2D. Internamente constrói uma matriz afim 3×3 usada para transformações de mudança de base.
import plane.CoordinateSystem2D
import plane.elements.Direction2D
import plane.elements.Point2D
import units.Angle
// Sistema cartesiano padrão (x à direita, y para cima, origem em 0,0)
val standard = CoordinateSystem2D.MAIN_2D_COORDINATE_SYSTEM
// Sistema rotacionado — eixos inclinados 45°
val rotado = CoordinateSystem2D(
xDirection = Direction2D(1.0, 1.0), // normalizado automaticamente
yDirection = Direction2D(-1.0, 1.0),
origin = Point2D(2.0, 0.0)
)Propriedades
| Membro | Descrição |
|---|---|
xDirection: Direction2D |
direção unitária do eixo x |
yDirection: Direction2D |
direção unitária do eixo y |
origin: Point2D |
origem do sistema |
affineMatrix: SimpleMatrix |
matriz de transformação afim 3×3 |
Rotação
Retorna um novo CoordinateSystem2D com seus eixos e origem rotacionados:
val sys = CoordinateSystem2D.MAIN_2D_COORDINATE_SYSTEM
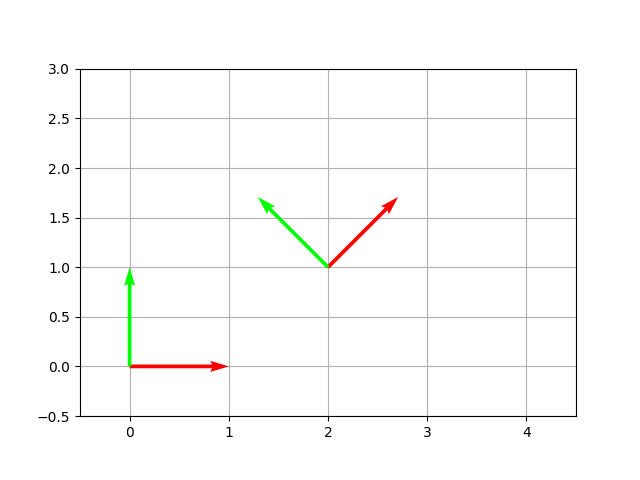
val rotado = sys.rotate(Angle.Degrees(30.0))O gráfico abaixo mostra o sistema cartesiano padrão (vermelho/verde na origem) ao lado de um sistema personalizado rotacionado 45° ancorado em (2, 1):
Mudança de base
Qualquer Entity2D pode ser reexpresso em outro sistema de coordenadas usando changeBasis():
val sistemaA = CoordinateSystem2D(
xDirection = Direction2D(1.0, 0.0),
yDirection = Direction2D(0.0, 1.0),
origin = Point2D(1.0, 0.0)
)
val sistemaB = CoordinateSystem2D.MAIN_2D_COORDINATE_SYSTEM
val ponto = Point2D(2.0, 1.0) // como escrito no sistemaA
// Expressar o mesmo ponto no sistemaB
val pontoEmB = ponto.changeBasis(asWrittenIn = sistemaA, to = sistemaB)Internamente isso computa:
sistemaB.affineMatrix⁻¹ × sistemaA.affineMatrix × ponto.affineMatrixExemplo prático — expressando um polígono em um referencial inclinado
import plane.Polygon2D
import plane.CoordinateSystem2D
import plane.elements.Direction2D
import plane.elements.Point2D
import units.Angle
val quadrado = Polygon2D(listOf(
Point2D(0.0, 0.0),
Point2D(1.0, 0.0),
Point2D(1.0, 1.0),
Point2D(0.0, 1.0)
))
val sistemaInclinado = CoordinateSystem2D(
xDirection = Direction2D(1.0, 1.0),
yDirection = Direction2D(-1.0, 1.0),
origin = Point2D(0.5, 0.5)
)
val quadradoInclinado = quadrado.changeBasis(
asWrittenIn = CoordinateSystem2D.MAIN_2D_COORDINATE_SYSTEM,
to = sistemaInclinado
)